
Announcing change detection for road signs

“Change is the only constant” - Heraclitus
Nexar has always prided itself on its coverage, and the ability to provide a constant stream of fresh images from the road. With 130 million miles driven monthly (and growing), Nexar captures very recent images of roads everywhere. If something changes, whether a traffic sign, a work zone or anything else, Nexar’s crowd-sourced vision probably captured that change. The image of the changed element is going to be far fresher than any image coming from any other source you can think of (unless you plan to send someone there, with camera in tow).
Yet the entire point about crowd-sourced vision is that while a raw image from the road is great, an automatic AI-powered detection on top of that image is much better. The reason is that just like humans can’t scour all streets for changes (whether on a scooter, on foot or in a car) they also can’t sit and comb through the huge mass of imagery created by crowd-sourced vision. Using AI on top of fresh imagery is what shows what changed and how, without a human needing to sift through thousands of images.
Today, we’re announcing a new form of change detection on our platform: road signs. But before we go into that, let’s see which forms of change detection we already provide.
Work Zones as a form of change detection
Work Zones, which are actually a non-trivial detection to make (since they involve several signs, barricades and more, as well as a determination of which lanes are affected), are a classic example of change detection.
- First the highway had no work zones;
- Then they were added, and;
- Now they’re blocking a lane.
Nexar has been providing this service for quite some time (check here to see if you’re eligible for a 3-month Build Back Better work zone license) to the public sector. Departments of Transportation and other mobility bodies need and want to warn drivers of work zones. They also want to better manage work zone deployment and the resulting congestion (as well as ensure they are built according to permit and are safe).
Work zone change detections are also valuable for assisted driving technologies and for Autonomous Vehicles since work zones significantly alter what’s allowed on the road. This can be quite crucial in cases where a work zone creates a detour that requires you to drive in the wrong-way lane. Humans grasp this change by looking at the signs and assessing the situation. AVs don’t, not yet. That’s one of the reasons mapping companies and AV companies that are looking at HD mapping list work zones as one of the most pertinent cases of change detection.
Here are some examples of Nexar work zone detections and how they’re reflected in our CityStream platform:

Announcing roadway inventory change detection
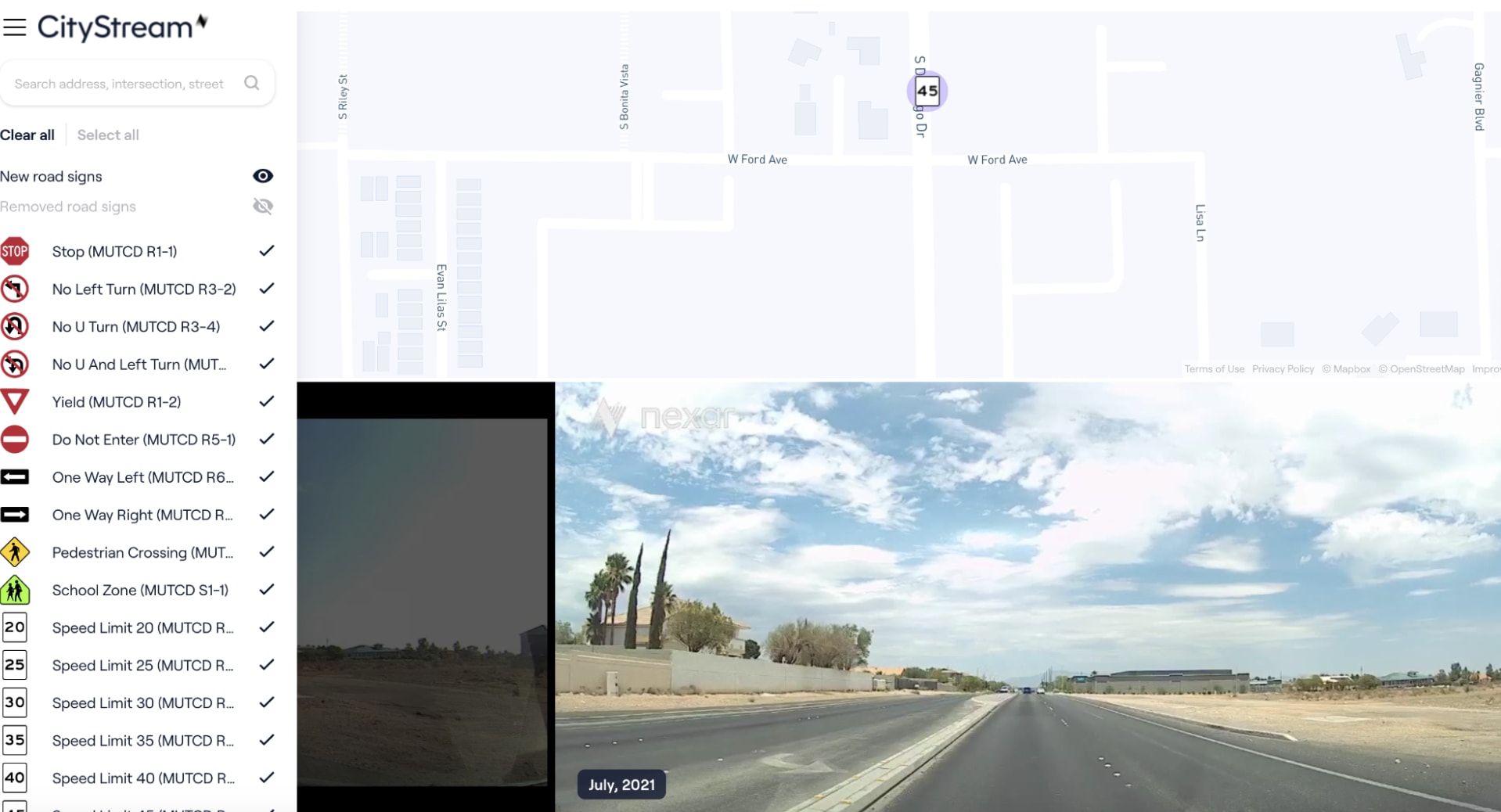
We’ve just released change detection for road signs, and it’s already used by RTC. Here’s an example from the Las Vegas Valley. Can you detect the difference between the two images?


For the public sector, change detection is important since it is incredibly helpful in understanding which road signs need attention, right now. Instead of waiting for surveyors or, even worse, for complaints, Nexar simply points out the changes. Some may be just like the example above: a new speed limit sign. Yet, in cases of damaged or missing signs (or the appearance of a sign that wasn’t supposed to be there), a list of changes can be incredibly valuable for any road or city official. Today, cities and DoTs manually check these signs using road inspectors - a costly and manual operation - which can also result in human error. By highlighting these changes, Nexar enables easier road management.
For mapping and AVs, road sign change detection can be a great overlay over base maps, or existing Lidar-based mapping. Nexar provides continuously updated high quality images of changes in signs, such as stop signs, speed limit signs and other navigation related data, enabling optimisation of routing. This is a direct result of the fact that Nexar’s approach of using consumer devices to see the world creates a scalable and economical way of ingesting and aggregating vision data that far exceeds the reach of Lidar, which is expensive and therefore less dense in terms of coverage. Today, in dense areas, such as Vegas or NYC, we see changes on an hourly basis, and less so in other areas, but in each case we leapfrog the annual or semi annual surveys by Lidar, if any. As we work on our platform we’ll increase the precision of detections, which will eventually make the data as useful as that provided by HD maps and far more feasible economically.
As we continue the work on Nexar’s platform, more change detections will come. The future of mobility requires a scalable ability to make sense of the physical world as it is, right now. Crowd-sourced vision is the only way to do that.